Quarterly release - 2026-03-02
RigiCloud and Edge Node - v1.18.0:
New features
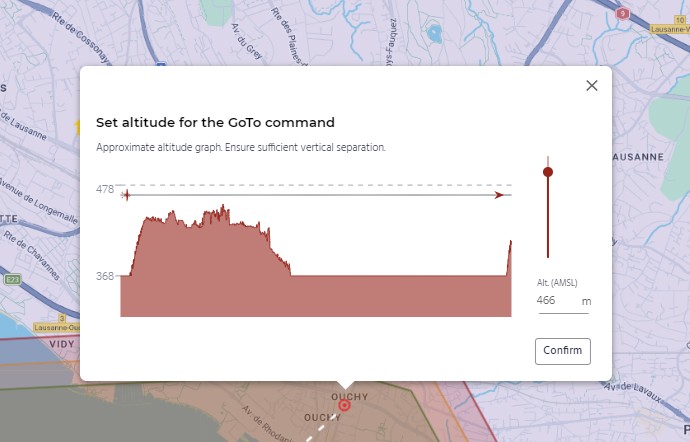
- GoTo command added in both Control Tower and the public API.
- SRP projection in Airbridge Planner: The same rally point can now be projected onto up to three mission segments allowing to fly A-B-A and/or loop missions with optimal route to the RP. The threshold distance between segments which lead to a valid rally point projection can be selected while planning a route.
- Simulator failure injector introduced for training scenarios and battery reset testing.
- Airspeed calibration button now available (R&D, production and debug from RigiTech support).
Fixed/Improved
- Simulator relocation between sites is now significantly faster.
Others
- RTK is now enabled by default in all projects where available. When planning routes, operators must use markers properly for takeoff and landing locations to avoid deviations.
Onboard software (OC) - v1.3.0:
New features
- Improved firmware for fixed-wing motor failure detection for more reliable monitoring.
- Hold commands sent manually are now rejected if the command leads to a breach of the pregeocage.
Fixed/Improved
- Enhanced validation of running AP/FS versions to prevent software mismatch issues.
- Default APN configuration now sets IP type to IPv4.
Autopilot (AP) software - v2.11.0:
New features
GoTo:
- New mode which allows to go to a location selected on the map.
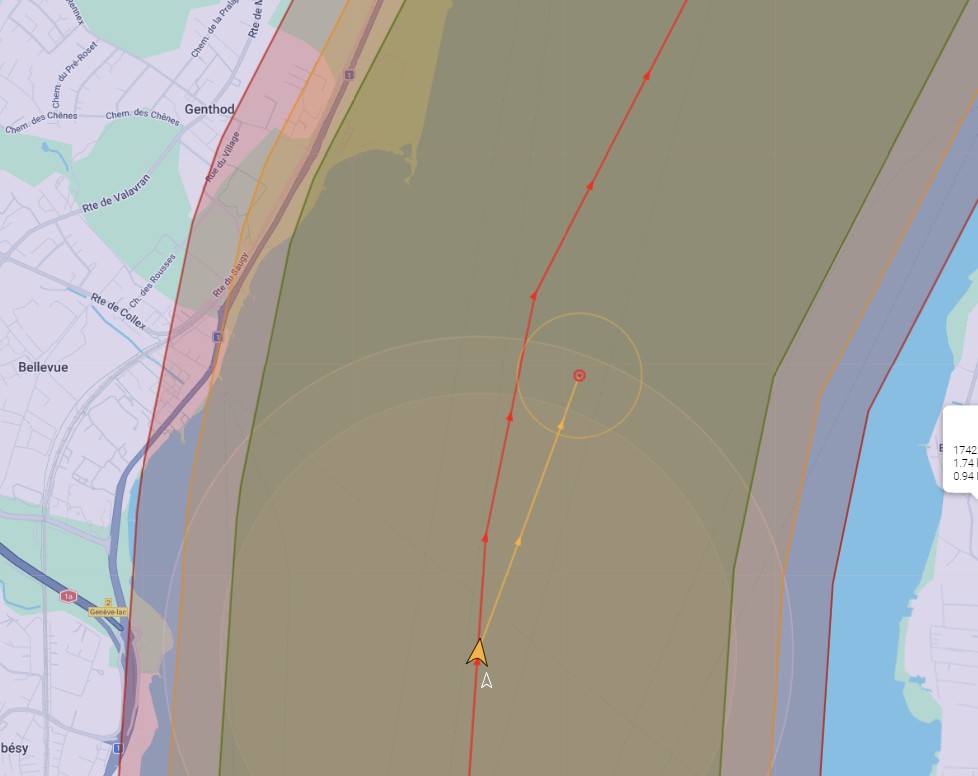
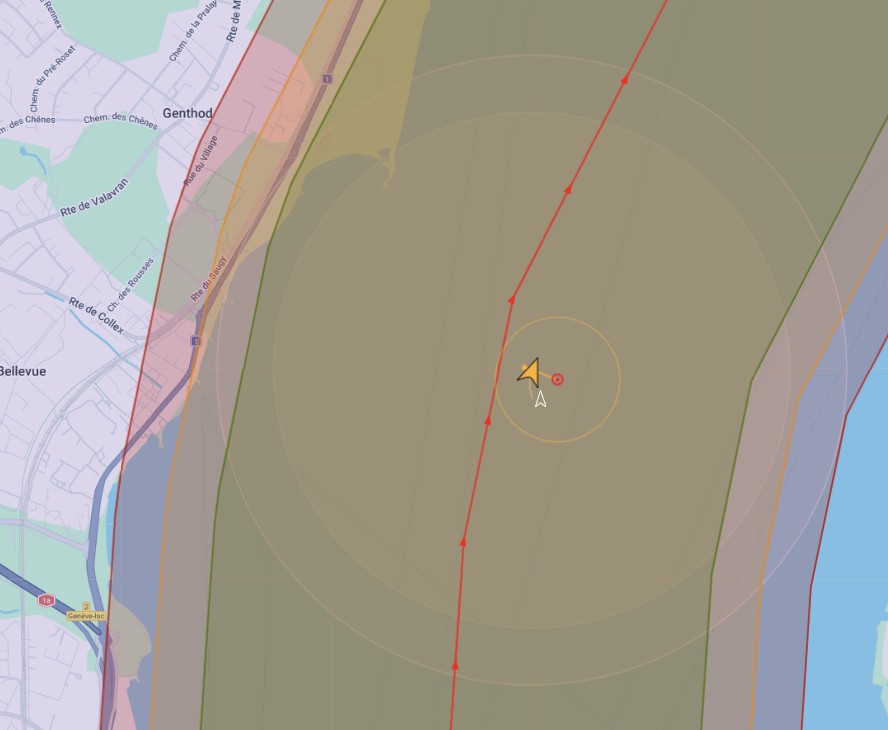
- Fixed-wing: the UA will loiter around the GoTo location with a fixed loiter raidus.
- Multicopter: the UA will Hold at the GoTo location.
- To exit the Hold pattern, a new command must be sent (e.g. RTO, CO, SRP, etc.). Once the new command is received, the algorithm determines the most logical point on the flight plan for the vehicle to rejoin or continue its route (the "branch-in" point) from its current location.
- New mode which allows to go to a location selected on the map.
U-turn (for RTO, CO, and SRP):
- If the geocage is predicted to be breached during a fixed-wing turn, instead of rejecting the mode change, the UA will now accept the mode change and perform an MC turn (BT + 180 + FT).
- If the mode change is triggered during a FT and a U-turn is required, the FT is aborted (allowing to fly the previous segment in MC mode).
Reverse to Takeoff (RTO):
- RTO is now running directly in the autopilot.
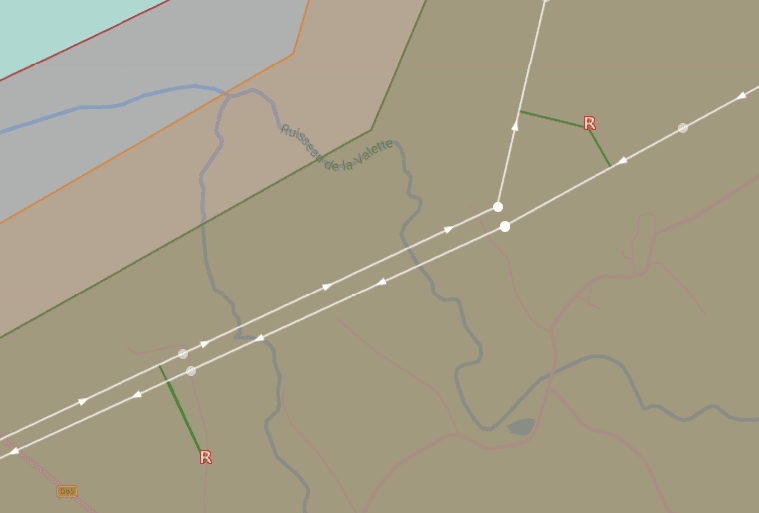
Smart-Rally-Point (SRP):
- SRP now selects the “closest” rally point by minimizing the along-route distance from the UA projection to the RP’s branch-off projection (plus a penalty of 4 km if a fixed-wing U-turn is required).
- SRP now rejects candidates whose path (branch-off to rally point) breaches a geocage.
- If there are no rally points available, SRP falls back to the closest mission endpoint (takeoff or landing) based on the same path-cost logic (instead of continuing to the mission-end).
- Coinciding segments: the same rally point can now be projected onto several segments allowing to fly A-B-A and/or loop missions with optimal route to the RP.
- Fixed-wing SRP can now go “behind” to reach a rally point by flying the mission route in reverse, but it is discouraged via a 4 km penalty.
- Rally points can now be projected onto loop jump segments.
Fixed/Improved
- All rally points are now considered as potential candidates in all modes despite consecutive mode changes.
Failsafe Computer (FS) firmware - v1.3.0:
Fixed/Improved
Hotfixes:
Onboard software (OC) - v1.3.1 - 2026-03-02:
Fixed/Improved
- Fix issue with on-ground sync of recorded videos after landing.
Autopilot (AP) software - v2.11.1 - 2026-03-02:
Fixed/Improved
- During a multicopter U-turn, compensate for the altitude gained during the back transition before aligning and performing the front transition.
Onboard software (OC) - v1.3.2 - 2026-03-12:
Fixed/Improved
- Fix issue leading to wrong display of mode in flight.
- Fix issue not being able to execute mission after first mission start failure.
- Improved logging of CPU usage.
- Tighter horizontal and vertical tolerance for takeoff when in RTK mode.
Autopilot (AP) software - v2.11.2 - 2026-03-12:
Fixed/Improved
- Optimization for CPU usage.
Onboard software (OC) - v1.3.3 - 2026-05-01:
Fixed/Improved
- Updater fix when pulling autopilot firmware.
Autopilot (AP) software - v2.11.3 - 2026-05-01:
Fixed/Improved
- Reduce time constraints to avoid unexpected stale targets leading to missed precision landings.